Chapter 2: Design Methods
Executable principles, failure analysis, decision logic, and engineering checklists for system design
2.1 Executable Principles and References
Effective underground parking surveillance design requires adherence to a set of actionable engineering principles that go beyond generic "best practices." Each principle below is directly tied to a specific failure mode observed in real deployments, and each has a clear application context and reference basis. Following these principles in sequence during the design phase prevents the most common and costly post-installation defects.
| # | Principle (Actionable) | Why It Matters | Applies When |
|---|---|---|---|
| 1 | Design by evidence objective (plate/face/behavior), not by megapixels | Prevents wrong specs and over/under-investment | All projects — first design step |
| 2 | Use dedicated LPR cameras at all vehicle portals | General cameras fail under headlight glare and backlight | All entrances and exits |
| 3 | Enforce NTP time synchronization end-to-end on all devices | Cross-camera correlation requires aligned timestamps | Any multi-camera deployment |
| 4 | Plan overlapping coverage at all turns, ramps, and intersections | Eliminates blind zones that invalidate forensic evidence | Curves, ramps, intersections |
| 5 | Prefer true WDR (≥120dB) with tuned exposure profiles per zone | Headlights and backlit exits require dynamic range beyond standard sensors | Entrances, exits, ramp portals |
| 6 | Segment the surveillance network with dedicated VLAN and ACL rules | Reduces lateral movement risk and isolates camera traffic | Any IP-based CCTV system |
| 7 | Deploy UPS for all critical nodes: core switch, entrances, and storage | Abrupt power loss corrupts recording databases and evidence indexes | Sites with unstable power or regulatory requirements |
| 8 | Seal all cable entries with IP67 glands and install drip loops | Underground condensation and water seepage are primary failure causes | All outdoor and underground installations |
| 9 | Record with H.265 + GOP policy aligned to search and seek requirements | Balances storage capacity with fast clip retrieval performance | All continuous recording deployments |
| 10 | Design for maintainability: consistent labels, cable slack, and access space | Reduces mean time to repair (MTTR) and prevents mislabeling errors | All installations |
| 11 | Include worst-case lighting tests in acceptance criteria | Daytime tests miss night headlight and backlight failures | Portal and ramp commissioning |
| 12 | Evidence export must include cryptographic hash and audit trail | Provides tamper resistance for legal proceedings | Any site with legal evidence requirements |
2.2 Failure Causes and Recommendations
The following table maps the most common failure patterns observed in underground parking surveillance deployments to their root mechanisms and actionable avoidance strategies. Understanding these failure chains during the design phase allows engineers to proactively specify the correct components, installation methods, and configuration parameters before problems occur in the field.
| Common Failure | Mechanism | Avoidance / Recommendation |
|---|---|---|
| Plate capture unstable | Motion blur + headlight glare + insufficient pixels-on-target | Dedicated LPR camera; shutter control 1/500–1/2000; correct distance and angle; controlled illuminator |
| Turn accidents not provable | Blind spots at ramp curve apex; single camera insufficient | Chained cameras with overlapping FoV; panoramic at intersection nodes; adjust heights and angles |
| Night overexposure | Headlights saturate sensor; WDR not activated or misconfigured | True WDR ≥120dB; anti-glare mounting angle; exposure ROI excluding headlight area |
| Water seepage damages cameras | Water enters via conduit or unsealed gland; no drip loop | Drip loop at all cable entries; IP67 glands matched to cable OD; waterproof junction boxes; avoid upward cable entry |
| Fogging and image haze | Condensation on lens window from temperature swings | Anti-fog housing; breathable membrane; cabinet RH monitoring; desiccant replacement schedule |
| Playback hard to find | Poor naming conventions; no event indexing; time drift | Zone naming standard; mandatory NTP; bookmarks; plate and event index; consistent camera ID scheme |
| Network drops cause recording gaps | Uplink oversubscription; multicast storms; no QoS | Bandwidth budget per zone; QoS marking; storm control; 10G uplinks for dense deployments; LACP bonding |
| Storage retention falls short | Underestimated bitrate; RAID overhead not accounted for | Use capacity calculator; tiered retention (hot/warm); VBR + ROI encoding; add disks with headroom |
| Cyber compromise | Default passwords; exposed management ports; no VLAN | VLAN isolation; MFA for VMS; disable UPnP; monthly patching; audit log retention; least privilege RBAC |
2.3 Core Design and Selection Logic
The design process follows a structured decision flow that begins with defining evidence objectives per zone and progresses through camera selection, coverage validation, network and storage sizing, reliability planning, security baseline, and acceptance test design. This sequential approach ensures that each downstream decision is grounded in the upstream evidence requirements rather than driven by product availability or budget alone.
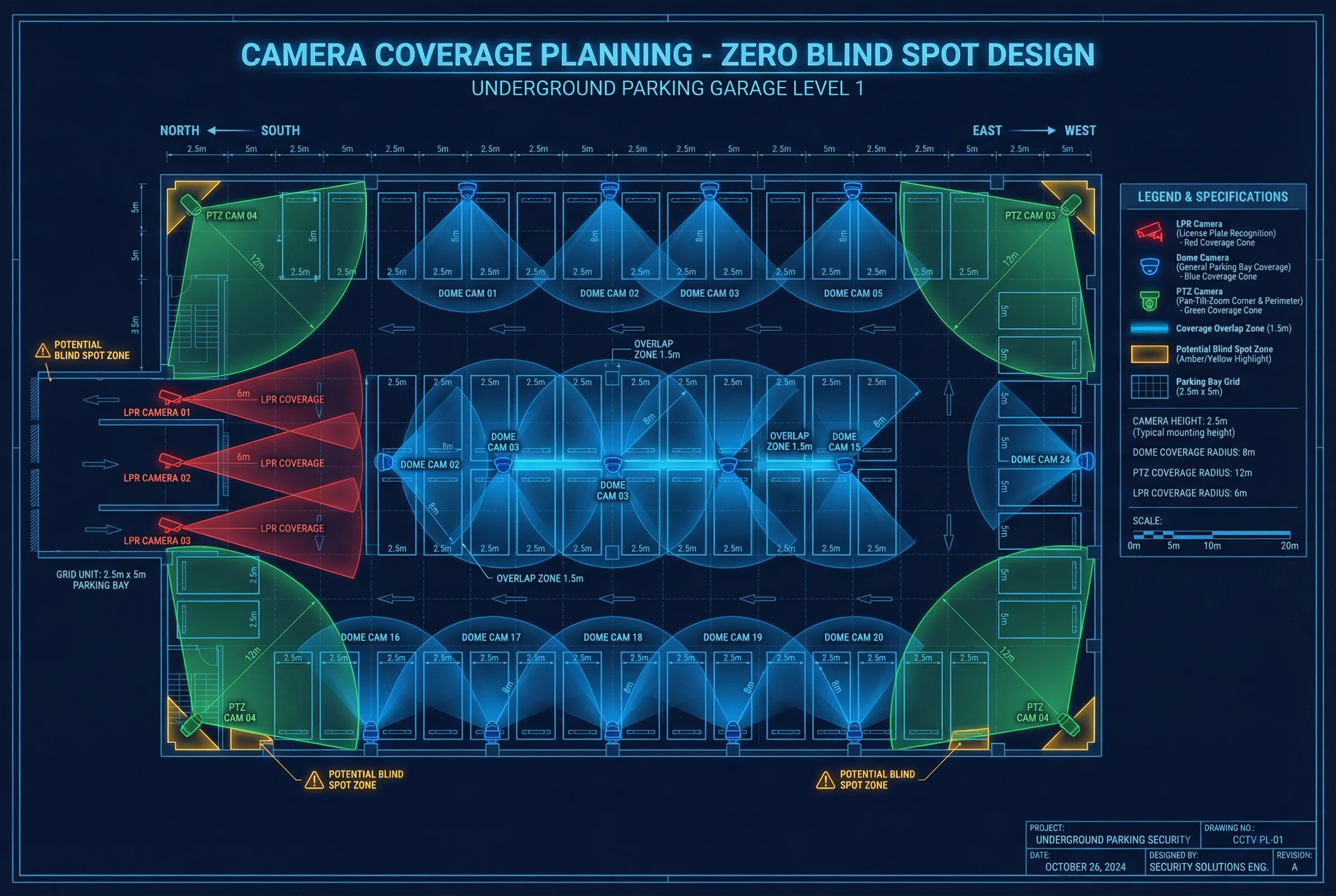
Figure 2.1: Camera Coverage Planning — Annotated Parking Floor Plan Showing Camera Positions, Fields of View, and Zone Assignments
Design Decision Steps
- Define evidence classes per zone: Plate identification / Face recognition / Behavior analysis / Asset protection — each zone may require a different class
- Set minimum pixels-on-target, maximum acceptable blur, and lighting extremes for each zone based on evidence class requirements
- Choose camera type and optics: Select focal length, sensor size, WDR rating, and illuminator strategy based on zone geometry and lighting analysis
- Build coverage map with overlap: Validate that no blind zone exceeds the defined tolerance (typically 2–3 m) using scaled floor plan drawings
- Compute bandwidth and storage: Use the bandwidth and storage calculators to iterate bitrate, codec, GOP length, and retention settings
- Define reliability scope: Determine UPS coverage, redundant uplinks, spare parts inventory, and failover behavior for each critical node
- Define security baseline: Assign VLAN segmentation, ACL rules, credential policy, firmware update schedule, and logging requirements
- Produce acceptance test plan: Include worst-case lighting tests (night drive-through with headlights), failure injection tests (uplink down, server failover), and integration event tests
Figure 2.2: Camera Selection Criteria — Left: Pixels-on-Target vs. Distance for Different Focal Lengths; Right: WDR Performance vs. Lighting Scenario
2.4 Key Design Dimensions
Every underground parking surveillance design must be evaluated across seven key dimensions. These dimensions represent the primary trade-off axes that engineers must balance when making specification and configuration decisions. Optimizing for one dimension without considering the others leads to predictable imbalances — for example, maximizing resolution without considering storage capacity results in premature retention failures.
| Dimension | What to Optimize | Typical Measures | Common Trade-off |
|---|---|---|---|
| Performance / Experience | Clarity, search speed, and identification accuracy | Plate read rate; time-to-find clip; concurrent playback clients | Higher resolution → more storage and bandwidth |
| Stability / Reliability | Fewer recording gaps and hardware failures | System uptime; MTBF; recording continuity percentage | More redundancy → higher CapEx |
| Maintainability | Low mean time to repair (MTTR) | Labeling quality; cable access; spare parts availability | Better maintainability → more installation time |
| Compatibility / Expansion | Future camera and system integration capability | ONVIF profile compliance; API capability; license headroom | Open standards may limit advanced features |
| LCC / TCO | Total cost over system lifecycle (5–10 years) | Energy consumption; disk replacement cycles; labor hours | Lower CapEx often means higher OpEx |
| Energy / Environment | Lower power consumption and heat generation | PoE budget utilization; server power efficiency (PUE) | Energy efficiency may require newer, costlier hardware |
| Compliance / Certification | Electrical safety, privacy, and audit requirements | Electrical test results; audit log completeness; privacy masking | Compliance adds design and documentation overhead |